Última Versão de Software para o Display Ti7
10 Jul 2026
Esta é nossa última versão de software para o display Ti7.
Novas Funcionalidades
Adicionamos novas funcionalidades para melhorar o desempenho e a usabilidade. Confira as novidades desta atualização.
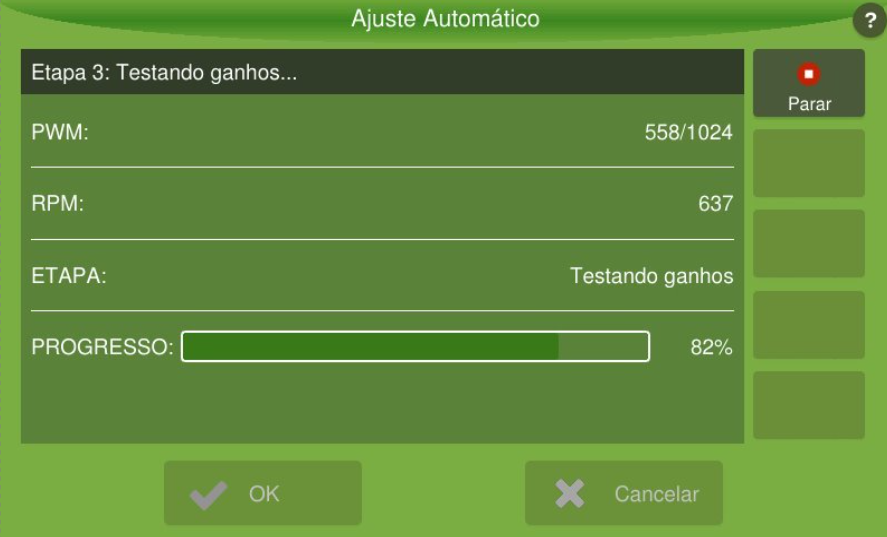
Auto Tuning
Ajustar os controladores de taxa para fertilização ficou mais fácil. O Auto Tuning é um processo automático que utiliza as configurações de velocidade do controlador como ponto de partida. O roteamento consiste em um conjunto de saídas que permite identificar os ganhos de controlador para este implemento.
Suporte SPAN da NovAtel
Agora é possível usar o SPAN para aprimorar o posicionamento em terrenos difíceis, curvas e em áreas com recepção limitada de satélites. Por favor, entre em contato com o time de suporte para mais informações.
Monitoramento de Rádio
Ao usar a Alocação Dinâmica de Transbordo, os displays irão carregar automaticamente alguns dados de todas as máquinas do grupo de colheita. Com o Monitoramento de Rádio, é possível saber onde as máquinas estão e ter uma ideia do que está acontecendo, mesmo que a maioria do grupo de colheita não tenha conexão com a internet.
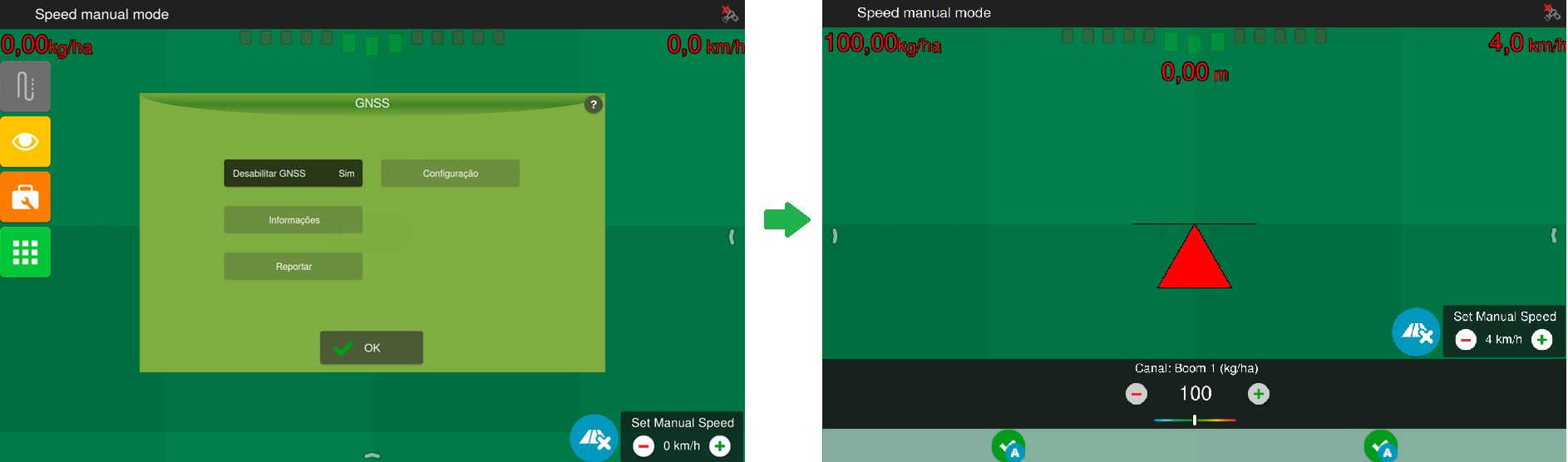
Velocidade Manual
Novo modo onde os usuários podem definir uma velocidade simulada, permitindo testes de implementos, auditoria de aplicação de insumos e operação em ambientes com sinal GNSS negado – interferência, falsificação de sinal ou visão bloqueada de satélites. Para usar este modo, configure-o na tela de configurações do GNSS e defina a velocidade simulada em um novo widget disponível na tela de operação.
Melhorias:
Esta atualização também inclui aprimoramentos de recursos existentes, melhorando o desempenho e a eficiência.
Global
-
Melhoria no arquivo de operação (.ti): a posição dos pontos agora representa o centro da barra do implemento. Anteriormente, representava a posição da antena GNSS.
-
As informações do modelo de hardware agora são exibidas claramente na tela Sobre para facilitar a identificação.
-
O firmware GNSS usado pelo display foi atualizado para uma versão mais recente, ajudando a manter um desempenho confiável de posicionamento e a compatibilidade contínua.
-
Ajustamos o comportamento da direção para que a orientação seja mais estável durante a operação.
Piloto Automático
-
Algoritmo de Piloto Automático reformulado, alcançando desempenho superior. Em alguns testes, a distância até a trajetória esperada foi reduzida de 30 cm para 5 cm. Essas melhorias têm maior impacto em condições de terreno irregular e em curvas. É necessário atualizar o firmware da ECU para acessar essas melhorias.
-
Foi introduzido um novo ganho de substituição manual, começando com um modo de compatibilidade. Esta atualização cria uma nova variável para salvar a configuração de sobrecarga manual para o Track Controller. Agora, um valor de 0 a 100% pode ser definido, proporcionando maior flexibilidade nas configurações de sobrecarga manual.
Alocação Dinâmica de Transbordo
-
Comunicação de rádio mais estável: as mensagens de rádio foram otimizadas, o que reduz erros de rede sobrecarregada e mensagens perdidas.
ISOBUS TC
-
Suporte à antecipação do Controle de Seção configurada no implemento: para implementos que suportam essa configuração, o display usará automaticamente os valores definidos pelo próprio implemento. Isso pode ser visualizado nas configurações do Controle de Seção.
Monitoramento de Máquinas
-
Adicionado operador IN nas regras e aprimorado o título dos Alarmes criados pelo usuário.
-
Lacunas nos dados de monitoramento das máquinas: Corrigimos um problema em que acessos simultâneos por funções do sistema podiam travar o banco de dados e impedir o salvamento de novas mensagens. O sistema agora gerencia o acesso ao banco de dados de forma mais eficiente, mantendo seus dados de monitoramento completos e atualizados.
Correções de Bugs
Esta atualização corrige falhas para aprimorar a estabilidade e a confiabilidade.
Conexão
-
O gerenciamento de redes Wi-Fi foi aprimorado para que os nomes das redes, as atualizações de sinal e as redes salvas sejam exibidos e atualizadas de forma mais consistente, tanto no Wi-Fi interno quanto no externo.
-
Ajustamos a forma como o terminal verifica a conectividade para que ele possa mudar para a melhor rede disponível com mais confiabilidade.
-
Ajustamos o driver do dongle Wi-Fi, que antes mostrava a intensidade do sinal em 100%, mesmo quando o sinal real variava. Agora, a intensidade exibida reflete corretamente a qualidade real da conexão.
-
Foi removido um alarme falso de configuração incorreta do modem em displays com modem de comunicação móvel, quando o modem está configurado corretamente.
-
Agora você pode estabelecer uma conexão de dados móveis 3G no Ti7 sem que o modem fique permanentemente travado no estado "conectando", mesmo com o chip SIM e o sinal sendo detectados corretamente.
Cloud
-
Identificação correta do veículo no monitoramento de frota na nuvem. Agora o número de série do seu veículo é sempre reportado corretamente para a nuvem mesmo após desligamentos forçados, resolvendo casos raros em que veículos podiam aparecer com uma identidade incorreta no monitoramento de frota.
Controle de Implemento
-
Os valores de aplicação (área aplicada e taxa) agora são salvos corretamente ao alternar entre seções de trabalho durante operações de controle de pulverização, garantindo registros precisos para auditoria de calibração.
-
Um problema que afetava o registro de calibração de fertilizante para caixas de composto foi resolvido, cada evento de calibração agora é corretamente atribuído à caixa de composto que você selecionou, mesmo se o implemento reconectar ou recarregar sua configuração antes de você confirmar a calibração.
Gerenciamento de Atualizações
-
Ajustamos o tratamento da atualização para que ela seja concluída normalmente. Antes, o display podia travar e fechar inesperadamente durante uma atualização de software.
-
As atualizações CTI/UTI pelo display podiam falhar. Ajustamos esse processo para que sejam baixadas e instaladas com sucesso.
General
-
Quando o dispositivo era acessado remotamente, o relógio podia mostrar a hora incorreta. Ajustamos o tratamento da hora para que o horário correto seja exibido mesmo quando o GNSS não estiver disponível.
Melhor Desempenho
-
Durante o pareamento via RMT, a conexão sem fio entre os displays Harvester e Haul-Out podia ficar instável. Ajustamos esse comportamento para manter a conexão estável durante esse processo.
-
Maior estabilidade durante o trabalho no campo. Esta atualização corrige uma falha rara que, em alguns casos, podia causar o desligamento inesperado do display.
Monitor de Plantio
-
Pequenas melhorias e correções de bugs.
Problemas Conhecidos
Identificamos alguns cenários que podem afetar o comportamento do sistema. Estamos trabalhando para resolvê-los e garantir uma experiência ainda melhor no futuro.
-
Restaurar o backup de um display de modelo diferente vai fazer o sistema travar.
-
O Wi-Fi do Ti5 e Ti7 reinicia de tempos em tempos, impactando o emparelhamento Wi-Fi. O impacto estimado é ter dificuldades no emparelhamento em cerca de 9% das tentativas e falhar completamente em 5% das tentativas.
-
O suporte remoto pode não funcionar após a instalação de um cti.
-
A calibração do subsolador não funciona durante a criação do implemento.
-
A contagem de satélites é sempre zero ao usar o receptor GNSS OEM628 com NTRIP.
-
ALIGN: A posição do Rover é definida como "desconhecida" após a instalação das versões 4.8.1/4.8.2. Após a instalação das versões 4.8.1 ou 4.8.2, a posição do rover pode ocasionalmente ser exibida como "desconhecida." Este problema não é frequente e pode ser resolvido entrando na tela GNSS e definindo a posição manualmente.
-
Ao operar em áreas com cobertura de sinal móvel variável, a conexão de dados 3G pode desconectar e reconectar repetidamente em um loop contínuo, impedindo uma conectividade estável.